삼각비와 삼각함수는 공학, 특히 우리가 다루는 컴퓨터 비전과 3D 그래픽스, 그리고 제어 공학의 가장 밑바닥을 지탱하는 핵심 도구다. 기초 정의부터 미적분, 그리고 오일러 공식을 통한 덧셈 정리 증명까지, 엔지니어링 관점에서 필요한 내용을 정리한다.
1. 삼각비의 정의 (직각삼각형과 산의 비유)
가장 직관적인 정의는 산을 오르는 상황이다.
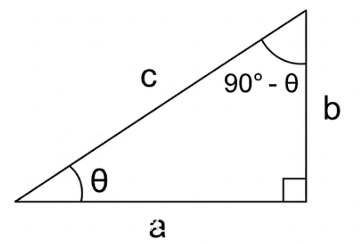
$$\sin \theta = \frac{b}{c}, \quad \cos \theta = \frac{a}{c}, \quad \tan \theta = \frac{b}{a}$$
2. 단위 원과 접선 (Tangible & Secant)
단위 원(반지름 $r=1$) 위에서의 해석은 좌표기하학으로 넘어가는 다리가 된다.
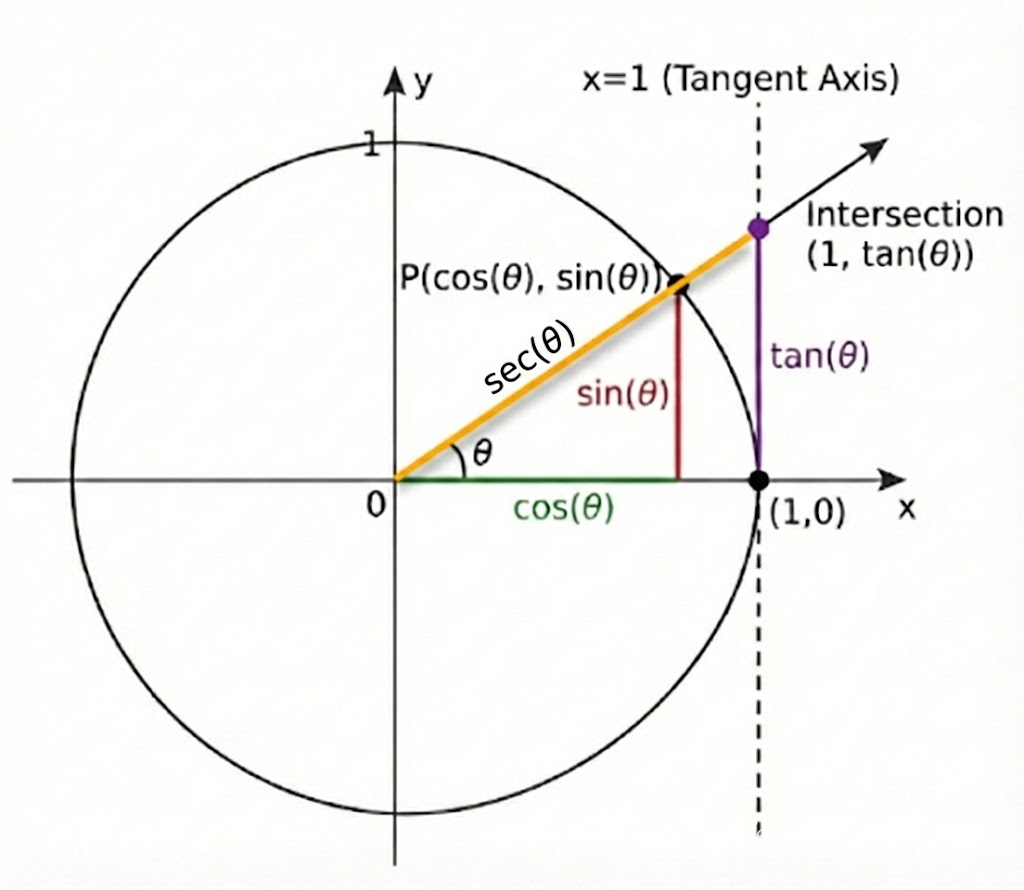
- cos: $x$ 좌표값.
- sin: $y$ 좌표값.
- $P(x,y) = (cos\theta , sin\theta )$
- tan: 원에 접하는(tangent)가 점 P를 지나는 직선(할선. secant)과 만나는 점까지의 거리. 좌표값=$(1, tan \theta$)
- sec: 시컨트(secant. 케익을 분할하듯이 자르는 선). 탄젠트가 만들어 놓은 산의 높이까지 걸어가는 거리.
sec와 tan은 원 밖에서 논다. 이 2의 정의가 없으면 cos와 sin의 아름다운 연결(아래 기본 항등식)을 볼 수 없었을 것이다. 또한 sec는 $1/cos(\theta)$가 됨을 그림 2를 보면 쉽게 알수 있게 된다.
기본 항등식
$$\tan \theta = \frac{\sin \theta}{\cos \theta}$$
안쪽 삼각형과 바깥쪽 삼각형이 닮음 조건으로 쉽게 알 수 있다.
3. 역수 관계
뒤집으면 새로운 이름이 붙는다.
$$\sec \theta = \frac{1}{\cos \theta}, \quad \csc \theta = \frac{1}{\sin \theta}, \quad \cot \theta = \frac{1}{\tan \theta}$$
윗 순서로 외우면 된다. 그래서 csc(co-secant)와 cot(co-tangent)만 있고, coc(co-cosine)가 없는 이유이다.
4. 특수각 암기 (패턴 인식)
무작정 외우기보다 $\sqrt{n}/2$ 패턴을 보면 잊을 수가 없다.
| 각도(θ) | 0∘ | 30∘ | 45∘ | 60∘ | 90∘ |
| $\sin \theta$ | $\frac{\sqrt{0}}{2}=0$ | $\frac{\sqrt{1}}{2}=\frac{1}{2}$ | $\frac{\sqrt{2}}{2}$ | $\frac{\sqrt{3}}{2}$ | $\frac{\sqrt{4}}{2}=1$ |
| $\cos \theta$ | $1$ | $\frac{\sqrt{3}}{2}$ | $\frac{\sqrt{2}}{2}$ | $\frac{1}{2}$ | $0$ |
| $\tan \theta$ | $0$ | $\frac{1}{\sqrt{3}}$ | $1$ | $\sqrt{3}$ | $\infty$ |
5. 육각형 공식 (제곱 공식과 미적분)
삼각형 세 개를 바람개비처럼 배치하고 가운데에 1을 둔다. 그리고, 좌측에는 원본 함수인 $sin, tan, sec$를 쓰고 우측에는 여각 함수를 쓰면 된다. $ cos, cot, csc$
이제 이 그림 하나로 제곱 공식과 미적분을 모두 처리할 수 있다.
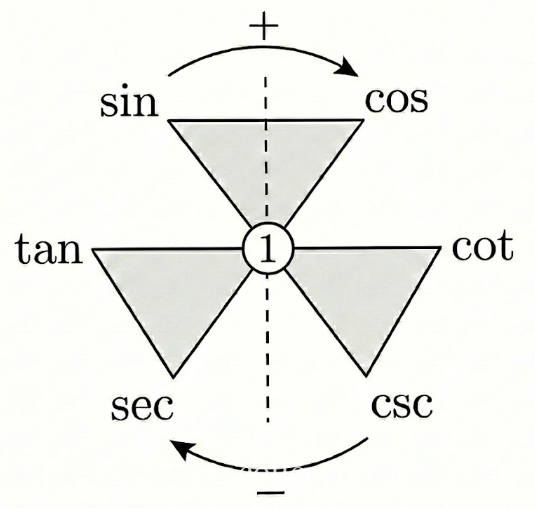
제곱 공식 (중앙 1과 각 삼각형의 꼭짓점 관계)
$$\sin^2 \theta + \cos^2 \theta = 1, \quad \tan^2 \theta + 1 = \sec^2 \theta, \quad 1 + \cot^2 \theta = \csc^2 \theta$$
미분 공식 (육각형의 층별 규칙)
- 최상단 (변신): 서로 바뀐다. (co가 붙으면 마이너스)$$ \frac{d}{dx}\sin x = \cos x, \quad \frac{d}{dx}\cos x = -\sin x$$
- 중간층 (이웃의 제곱):$$ \frac{d}{dx}\tan x = \sec^2 x, \quad \frac{d}{dx}\cot x = -\csc^2 x$$
- 최하단 (자기 자신 $\times$ 이웃):$$ \frac{d}{dx}\sec x = \sec x \tan x, \quad \frac{d}{dx}\csc x = -\csc x \cot x$$
적분 공식
적분은 미분의 역연산이며, 부호 변동이 반대임을 기억하면 된다. 단, 육각형 도형에서 좌측과 우측은 서로 미분, 적분하면 부호만 바꿔가면서 답을 바로 내 놓으나, 적분 $tan, cot, sec, csc$는 윗 그림을 이용해서 풀면 안된다.
https://ko.wikibooks.org/wiki/미분과 적분/삼각함수 적분
6. 일반각과 대칭성 (ASTC)
아래 그림과 간단한 규칙을 참조하면 90, 180, 270도에서 더하고 빼고를 간단하게 표현할 수 있다.
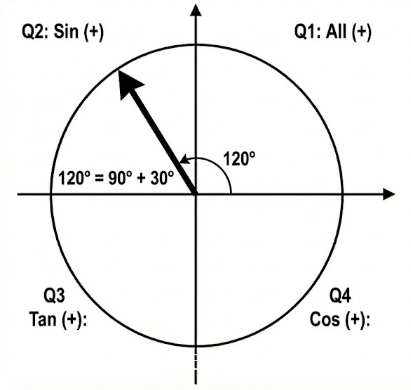
All – Sin – Tan – Cos (얼싸안꼬)
- 1사분면: 모두 양수
- 2사분면: Sin만 양수
- 3사분면: Tan만 양수
- 4사분면: Cos만 양수
변환 규칙 ($n\pi/2 \pm \theta$)
- $n$이 홀수면: $\sin \leftrightarrow \cos$, $\tan \leftrightarrow \cot$ 로 변경.
- $n$이 짝수면: 함수 유지.
- 부호는 원래 각도가 위치한 사분면의 원래 함수 부호를 따른다.
예시:
$$\sin(90^\circ + 30^\circ) = \cos 30^\circ$$
(90도는 홀수($1 \times 90$)니까 코사인으로 변환, 2사분면에서 사인은 양수니까 부호는 +)
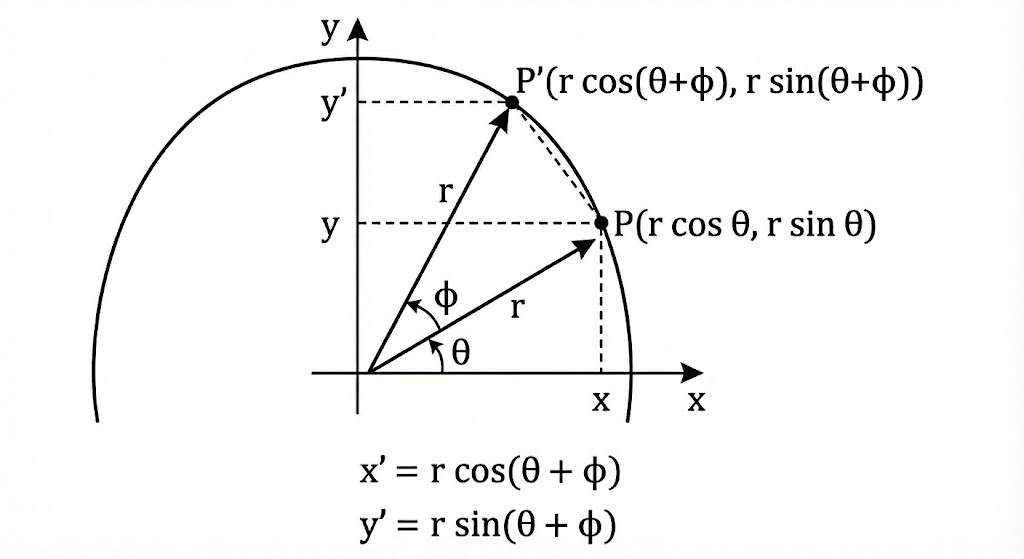
7. 덧셈 정리와 오일러 증명
자동제어와 신호처리에서 밥 먹듯이 나오는 공식이다. 절대 잊으면 안 된다.
공식
$$\sin(\alpha \pm \beta) = \sin \alpha \cos \beta \pm \cos \alpha \sin \beta$$
(신코프코신 : 신고 싶은 꽃신)
$$\cos(\alpha \pm \beta) = \cos \alpha \cos \beta \mp \sin \alpha \sin \beta$$
(코코마신신)
$$\tan(\alpha \pm \beta) = \frac{\tan \alpha \pm \tan \beta}{1 \mp \tan \alpha \tan \beta}$$
(일마탄탄 분의 탄프탄)
오일러 공식을 이용한 증명 (가장 우아한 방법)
오일러 공식: $e^{j\theta} = \cos\theta + j\sin\theta$
- 지수 법칙을 이용해 두 각의 합을 표현한다.$$e^{j(\alpha + \beta)} = \cos(\alpha + \beta) + j\sin(\alpha + \beta) \quad \cdots (1)$$
- 곱셈으로 분리해서 전개한다.$$e^{j(\alpha + \beta)} = e^{j\alpha} \cdot e^{j\beta} = (\cos\alpha + j\sin\alpha)(\cos\beta + j\sin\beta) \quad \cdots (2)$$
- (2) 식을 전개하여 실수부와 허수부로 묶는다.$$(\cos\alpha\cos\beta – \sin\alpha\sin\beta) + j(\sin\alpha\cos\beta + \cos\alpha\sin\beta) \quad \cdots (3)$$
(1)식과 (3)식의 실수부(Cos), 허수부(Sin)를 비교하면 덧셈 정리가 증명된다.
8. 회전 공식
덧셈공식을 회전공식이라고도 하는데 그 이유는 원래 각도에 다른 각도를 가감해서 회전을 하라는 의미이기 때문이다.
그런데 종종, 이러한 회전은 행렬로 표현된다. 그리고 이러한 유도는 덧셈공식을 이용한다.
$$R=\begin{pmatrix} cos \theta & -sin \theta \\ sin \theta & cos \theta \end{pmatrix}$$
여기서는 오일러 공식을 이용해서 회전 행렬을 복소평면에서 유도하겠다.
$e^{j\theta} = \cos\theta + j\sin\theta$
$P$가 복소수일 때, $\theta$ 만큼 회전하려면, 회전 연산자를 곱해주면된다.
$P’ = P e^{j \theta}$
원래의 $P$가 $x+j y$이므로,
$P’ = (x+ jy)(cos \theta + j sin \theta)$를 풀면
$(xcos \theta – y sin \theta) + j (x sin \theta + y cos \theta)$
그러므로,
$x’ = x cos \theta – y sin \theta$
$y’ = x sin \theta + y cos \theta$
윗 식은 미지수 2개를 가진 연립 방정식이고 cos, sin은 계수(웨이트)가 된다. 그러므로 아래와 같이,
$$\begin{pmatrix} x’ \\ y’ \end{pmatrix} = \begin{pmatrix} \cos\theta & -\sin\theta \\ \sin\theta & \cos\theta \end{pmatrix} \begin{pmatrix} x \\ y \end{pmatrix}$$
로 유도된다.
윗 행렬은, 컴퓨터 비전에서 이미지를 회전시키거나 로봇 팔을 제어할 때 사용하는 행렬이며 아래와 같이 나타낸다.
$$R(\theta) = \begin{pmatrix} \cos \theta & -\sin \theta \\ \sin \theta & \cos \theta \end{pmatrix}$$
그리고, 이러한 행렬 연산은 GPU 병렬 처리에 최적화되어 있어, 연산 효율성이 뛰어나 OpenCV를 이용한 영상처리 및 인공지능 학습에 좋은 수단을 제공하고 있다.
2026.1.17 표준문서화 함