
서보모터는 입력 주파수에 따라서 회전각도를 이동시킨다. 그러면 아래와 같은 일을 할 수 있다.
- 위치제어
- 속도제어
- 토크제어
분말충전기에 사용되는 오거를 회전시키는 역할은 위치제어를 사용한다. 주파수를 변화시키면 오거의 회전을 변화시킬 수 있기 때문이다.
서보 모터는 여러회사의 제품이 있으나 그 중 MINAS A6 SERVO MOTOR(MDMF152L1G6 : 1.5KW)와 MINAS A6 AMP(MDDLT55SF)를 가지고 배선하는 방법을 알아보겠다.
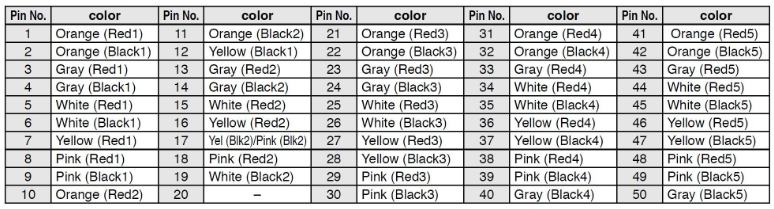
먼저 I/O 케이블은 X4단자에 연결된다. X4단자는 서보 AMP의 INPUT & OUTPUT 신호를 송수신하기 위한 단자이다. 이 케이블은 50PIN 3M
서보모터를 판매하는 대리점에서 서보모터를 구입하면 맨 처음 나와서 하는 일이 이 핀맵을 잡는 일이다. 기존에 사용하고 있는 핀맵정보가 있으면 대리점 측 기술지원 사원한테 제공해 준다.

이래는 회사에서 사용하고 있는 중요 파라메타값이다.
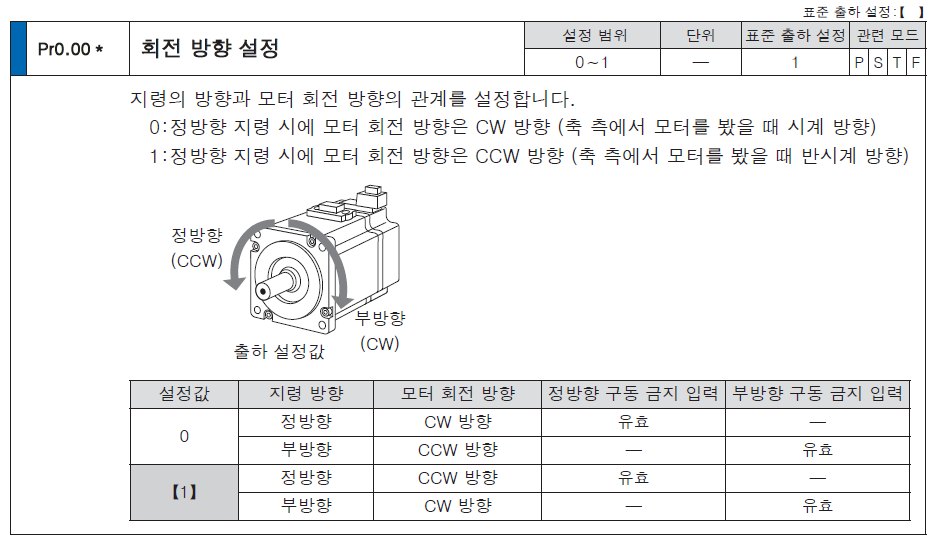
| Pr0.00 | 회전방향설정 | 1 | |
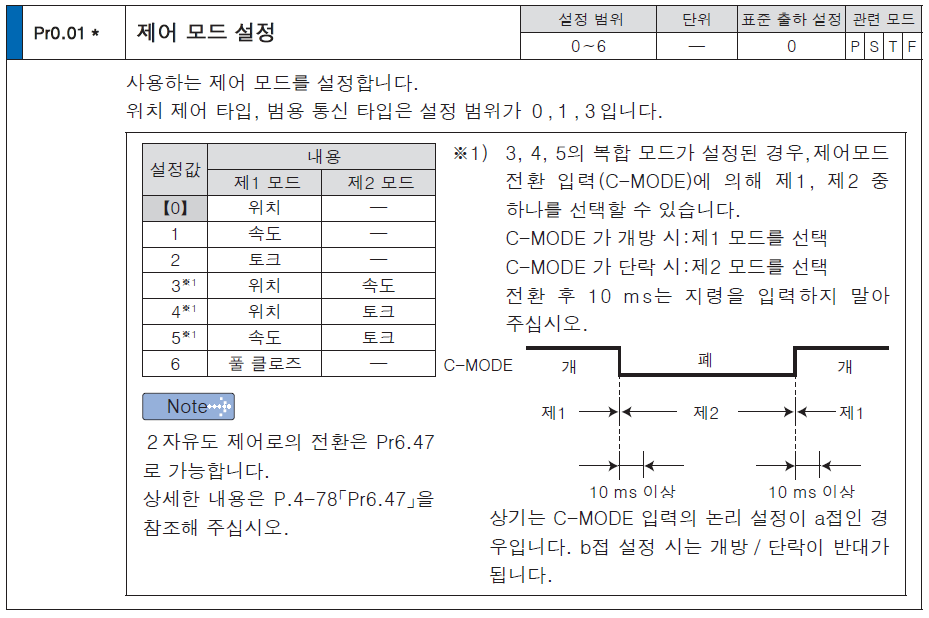
| Pr0.01 | 제어모드설정 | 0 | |
| Pr0.02 | 실시간 오토튜닝 설정 | 1 | |
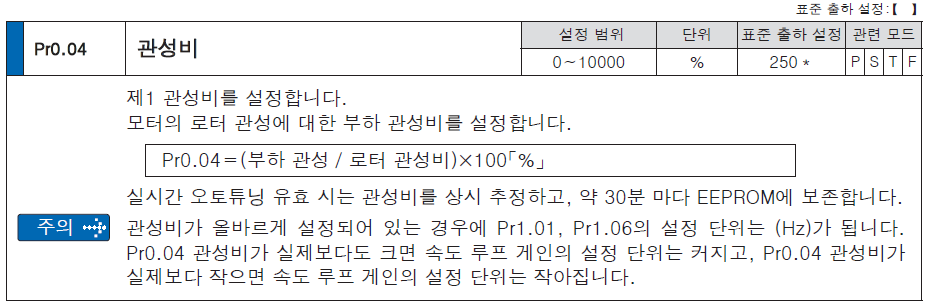
| Pr0.04 | 관성비 | 250 | |
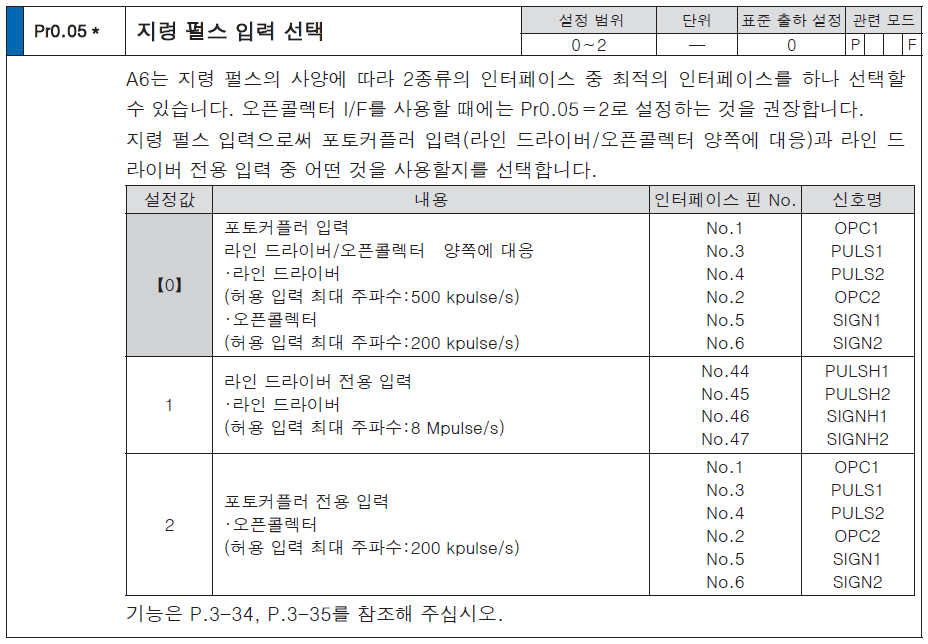
| Pr0.05 | 지령펄스입력선택 | 2 | |
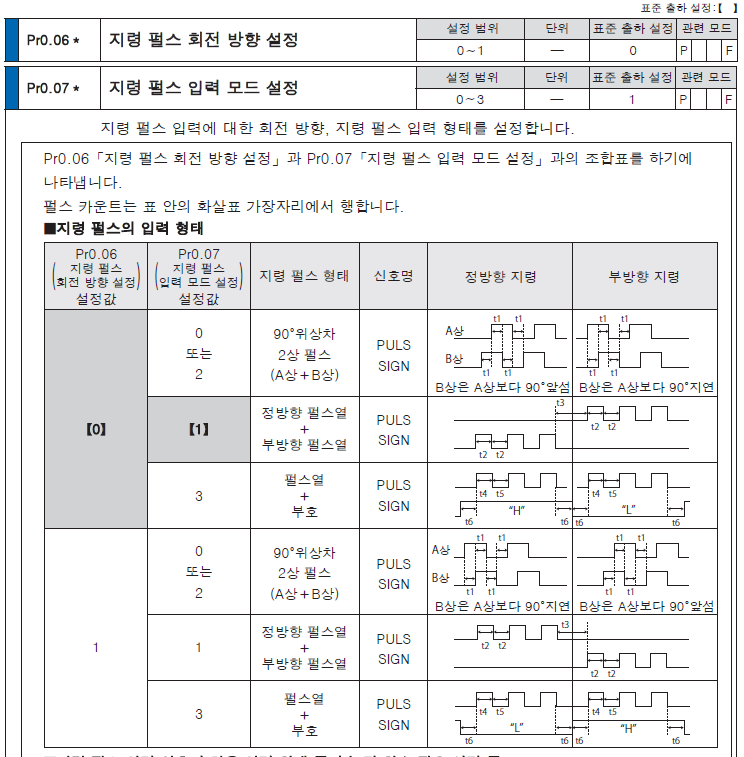
| Pr0.06 | 지령펄스회전방향설정 | 0 | |
| Pr0.07 | 지령펄스입력모드설정 | 1 |
아래는 파라메타 설명이다.
Pr0.00 회전방향설정
Pr.0.01 제어모드설정
Pr0.04 관성비
서보드라이버를 수동설정하는 방법
서보드라이버의 전면패널을 이용한다.
- 서보에 전원을 인가한다.
- MODE 버튼(M버튼)을 눌러서 SET PARAMETER로 간 후 SET(S버튼)
- 파라메타 번호를 화살표키를 이용해서 원하는 Pr 번호로 이동 후 SET(S버튼)을 누른다.
- 설정된 값을 변경 후 SET(S버튼)을 누른다.
- MODE(M버튼)를 계속 눌러서 SAVE PARAMETER 항목에 맞춘 후 SET(S버튼)
- 저장완료 메시지 뜨면 전원 OFF후 5초 후에 킨다.

